Zeitnehmung Lösung: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 1: | Zeile 1: | ||
== Hilfestellung und Lösung zur Zeitnehmung Aufgabe == | == Hilfestellung und Lösung zur Zeitnehmung Aufgabe == | ||
Baue zuerst zwei Sensor. Prüfe diese mit dem micro:bit. Programmiere zuletzt ein Programm um die gefahrene Zeit zu berechnen. | Baue zuerst zwei Sensor. Prüfe diese mit dem micro:bit. Programmiere zuletzt ein Programm um die gefahrene Zeit zu berechnen. | ||
====Hinweis 1: Baue einen Sensor, der erkennt ob das Spielzeugauto darüberfahrt ==== | ====Hinweis 1: Baue einen Sensor, der erkennt ob das Spielzeugauto darüberfahrt ==== | ||
| Zeile 51: | Zeile 50: | ||
</li> | </li> | ||
<li> | <li> | ||
Im micro:bit ist eine Uhr eingebaut. Diese startet bei 0 wenn der micro:bit eingeschaltet wird. | Im micro:bit ist eine Uhr eingebaut. Diese startet bei 0 wenn der micro:bit eingeschaltet wird. Der Befehl '''Laufzeit (ms)''' greift auf diese Uhr zu. Dieser gibt an wie viele Millisekunden seit dem Starten des micro:bits vergangen sind. Das ms steht für Millisekunden. Eine Sekunde besteht aus Tausend Millisekunden. | ||
</li> | </li> | ||
<li> | <li> | ||
Um die Zeit zu erhalten, die das Spielzeugauto vom ersten bis zum 2. Sensor | Um die Zeit zu erhalten, die das Spielzeugauto vom ersten bis zum 2. Sensor fährt, zieht der micro:bit die erste von der zweiten Zeit ab. | ||
Zum Beispiel: Das Auto fährt 300 ms nach dem Starten des micro:bits über den ersten Sensor und nach 500 ms über den zweiten Sensor. Dann | Zum Beispiel: Das Auto fährt 300 ms nach dem Starten des micro:bits über den ersten Sensor und nach 500 ms über den zweiten Sensor. Dann rechnet er 500 – 300 = 200 ms. Also benötigt das Auto vom ersten bis zum zweiten Sensor 200ms. | ||
</li> | </li> | ||
<li> | <li> | ||
Speichere die Zeit in eine Variable, wenn das Auto über den ersten Sensor fährt. Damit merkt sich der micro:bit diese Zeit. | |||
<br clear=all> | <br clear=all> | ||
[[Datei: ZnLsg_ZeitSpeichern.png|left]] | [[Datei: ZnLsg_ZeitSpeichern.png|left]] | ||
| Zeile 67: | Zeile 63: | ||
</li> | </li> | ||
<li> | <li> | ||
Ziehe die aktuelle Zeit von der vorher gespeicherten Zeit ab, wenn das Auto über den zweiten Sensor fährt. Dadurch erhält man die Fahrtzeit des Autos von Sensor1 zu Sensor2. | |||
</li> | </li> | ||
<li> | <li> | ||
Zeige diese Fahrtzeit nun auf dem micro:bit an. | |||
<br clear=all> | <br clear=all> | ||
[[Datei: ZnLsg_ZeitAnzeigen.png|left]] | [[Datei: ZnLsg_ZeitAnzeigen.png|left]] | ||
| Zeile 76: | Zeile 72: | ||
</li> | </li> | ||
<li> | <li> | ||
Eine Millisekunde ist ein Tausendstel | Eine Millisekunde ist ein Tausendstel einer Sekunde. Deswegen zeigt der micro:bit sehr große Zahlen an. | ||
Rechne die Fahrtzeit durch Tausend um eine lesbare Zahl zu erhalten. Auf der LED-Matrix erschienen dann die Sekunden vor dem Punkt und die Millisekunden nach dem Punkt. | |||
</li> | </li> | ||
<li> | <li> | ||
Wenn der erste Sensor anschlägt, zeige ein Zeichen auf der LED-Matrix an. Das hilft beim Erkennen ob der Sensor auch richtig auslöst. | |||
</li> | </li> | ||
</ul> | </ul> | ||
Der vollständige Lösungsvorschlag sieht dann so aus: | |||
<br clear=all> | <br clear=all> | ||
[[Datei: ZnLsg_Loesung.png|left]] | [[Datei: ZnLsg_Loesung.png|left]] | ||
<br clear=all> | <br clear=all> | ||
[https://makecode.microbit.org/_KxrLyvhxbKL5 Hier kommst du zum fertigen Programm auf makecode.org] | [https://makecode.microbit.org/_KxrLyvhxbKL5 Hier kommst du zum fertigen Programm auf makecode.org] | ||
Version vom 3. Dezember 2019, 17:19 Uhr
Hilfestellung und Lösung zur Zeitnehmung Aufgabe
Baue zuerst zwei Sensor. Prüfe diese mit dem micro:bit. Programmiere zuletzt ein Programm um die gefahrene Zeit zu berechnen.
Hinweis 1: Baue einen Sensor, der erkennt ob das Spielzeugauto darüberfahrt
-
Verwende dazu 2 leitende Materialen. Lege diese knapp nebeneinander. Das darüberfahrende Auto verbindet diese.
-
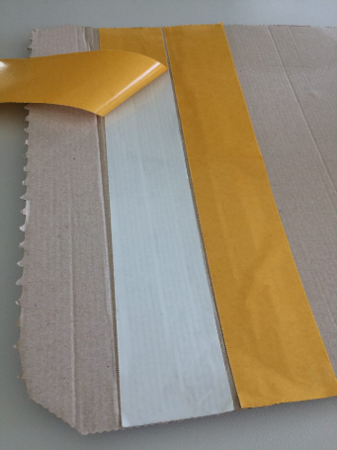 Doppelseitiges Klebeband
Doppelseitiges Klebeband -
 Alufolie
Alufolie -
 Alufolie getrennt
Alufolie getrennt
-
- Schreibe zum Testen ein Programm. Dieses schält bestimmte LEDs ein, wenn ein Sensor auslöst.



Hinweis 2: Mach dir einen Plan
- Die leitenden Materialien müssen mit Ground und einem Pin auf dem micro:bit verbunden werden.
-
-
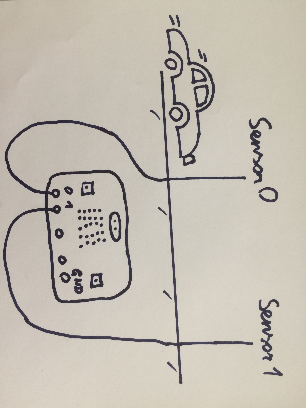 2 Sensoren
2 Sensoren -
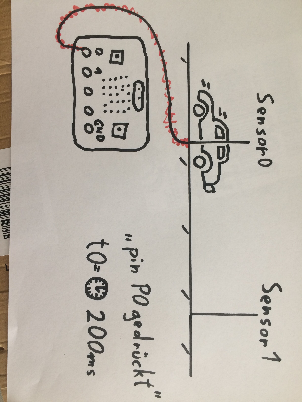 Sensor 1 aktiviert
Sensor 1 aktiviert -
 Sensor 2 aktiviert
Sensor 2 aktiviert
-
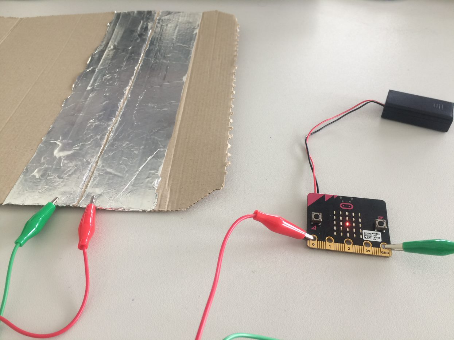 Sensor mit micro:bit
Sensor mit micro:bit -
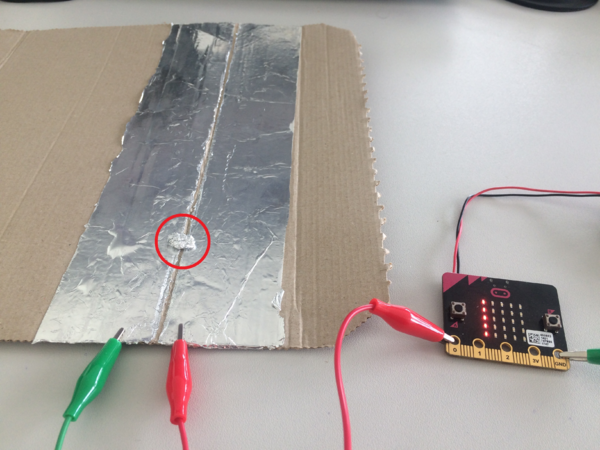 Sensor verbunden durch Alukugel
Sensor verbunden durch Alukugel
-





Hinweis 3: Sensoren prüfen
-
Zeige bestimmte Bilder an, wenn die Sensoren aktiviert werden.
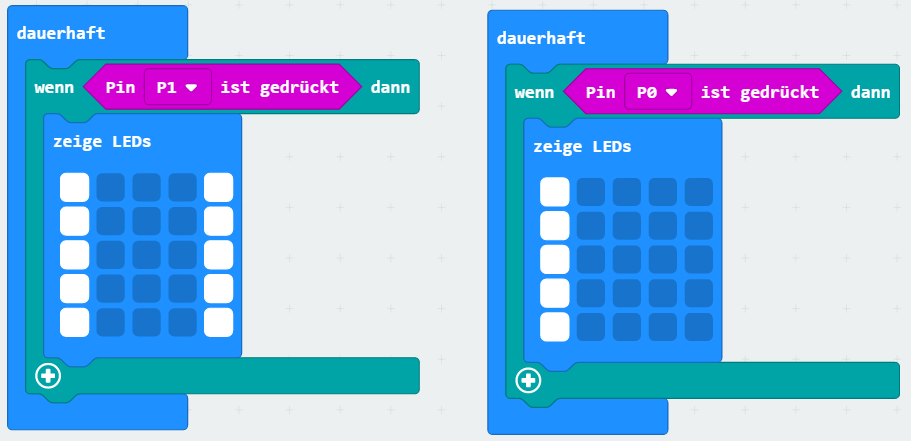
- Verbinde die beiden Sensorteile mit einem Alufolienstück. Überprüfe ob das richtige Bild am micro:bit angezeigt wird.

Hinweis 4: Zeitnehmung programmieren
- Der micro:bit hat keine eigene Stoppuhr-Funktion. Programmiere eine Stoppuhr mithilfe der eigenen Uhr des micro:bits.
- Im micro:bit ist eine Uhr eingebaut. Diese startet bei 0 wenn der micro:bit eingeschaltet wird. Der Befehl Laufzeit (ms) greift auf diese Uhr zu. Dieser gibt an wie viele Millisekunden seit dem Starten des micro:bits vergangen sind. Das ms steht für Millisekunden. Eine Sekunde besteht aus Tausend Millisekunden.
- Um die Zeit zu erhalten, die das Spielzeugauto vom ersten bis zum 2. Sensor fährt, zieht der micro:bit die erste von der zweiten Zeit ab. Zum Beispiel: Das Auto fährt 300 ms nach dem Starten des micro:bits über den ersten Sensor und nach 500 ms über den zweiten Sensor. Dann rechnet er 500 – 300 = 200 ms. Also benötigt das Auto vom ersten bis zum zweiten Sensor 200ms.
-
Speichere die Zeit in eine Variable, wenn das Auto über den ersten Sensor fährt. Damit merkt sich der micro:bit diese Zeit.

- Ziehe die aktuelle Zeit von der vorher gespeicherten Zeit ab, wenn das Auto über den zweiten Sensor fährt. Dadurch erhält man die Fahrtzeit des Autos von Sensor1 zu Sensor2.
-
Zeige diese Fahrtzeit nun auf dem micro:bit an.
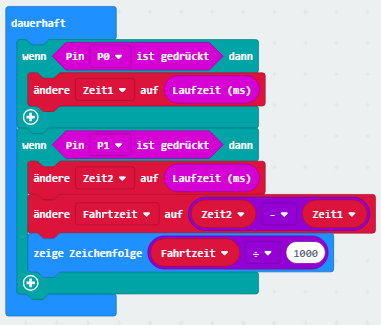
- Eine Millisekunde ist ein Tausendstel einer Sekunde. Deswegen zeigt der micro:bit sehr große Zahlen an. Rechne die Fahrtzeit durch Tausend um eine lesbare Zahl zu erhalten. Auf der LED-Matrix erschienen dann die Sekunden vor dem Punkt und die Millisekunden nach dem Punkt.
- Wenn der erste Sensor anschlägt, zeige ein Zeichen auf der LED-Matrix an. Das hilft beim Erkennen ob der Sensor auch richtig auslöst.


Der vollständige Lösungsvorschlag sieht dann so aus:
