Zeitnehmung Lösung: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| (Eine dazwischenliegende Version desselben Benutzers wird nicht angezeigt) | |||
| Zeile 4: | Zeile 4: | ||
<ul> | <ul> | ||
<li> | <li> | ||
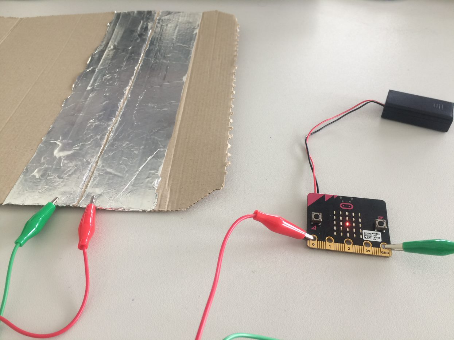
Der Sensor besteht aus zwei knapp nebeneinander liegenden Streifen Alufolie. Befestige diese mit doppelseitigem Klebeband auf der Strecke. Unten am Spielzeugauto ist ebenfalls ein am Boden schleifendes Stück Alufolie befestigt. Wenn das Auto über den Sensor fährt, verbindet dieses Stück Alufolie die beiden Streifen. Ein Alufolienstreifen wird an den 3V PIN des micro:bits angeschlossen, der andere an den PIN P0. Wenn kein Auto darüber fährt, besteht keine Verbindung zwischen den Alufolienstreifen und es liegt keine Spannung an P0 an. Der micro:bit erkennt an seinem PIN P0 Stromsignale. Wenn ein Auto über den Sensor fährt liegen 3V am PIN P0 an. Der micro:bit erkennt also, ob ein Auto über den Sensor fährt oder nicht. | |||
<gallery mode=packed-hover heights=300px class=left"}> | <gallery mode=packed-hover heights=300px class=left"}> | ||
Image:ZnLsg_DoppelseitigesKlebeband.png| | Image:ZnLsg_DoppelseitigesKlebeband.png|doppelseitiges Klebeband | ||
Image:ZnLsg_Alufolie.png|Alufolie | Image:ZnLsg_Alufolie.png|Alufolie | ||
Image:ZnLsg_AlufolieGetrennt.png|Alufolie getrennt | Image:ZnLsg_AlufolieGetrennt.png|Alufolie getrennt | ||
| Zeile 12: | Zeile 12: | ||
</li> | </li> | ||
<li> | <li> | ||
Teste deinen Sensor indem du eine LED einschaltest, wenn ein passierendes Auto den Kontakt zwischen den beiden Alufolienstücken herstellt. | |||
</li> | </li> | ||
</ul> | </ul> | ||
==== Hinweis 2: | ==== Hinweis 2: Mache dir einen Plan ==== | ||
<ul> | <ul> | ||
<li> | <li> | ||
| Zeile 26: | Zeile 26: | ||
<gallery mode="packed-hover" heights=300px style="text-align:left"}> | <gallery mode="packed-hover" heights=300px style="text-align:left"}> | ||
Image:ZnLsg_SensorMicrobit.png|Sensor mit micro:bit | Image:ZnLsg_SensorMicrobit.png|Sensor mit micro:bit | ||
Image:ZnLsg_SensorMicrobit2.png|Sensor verbunden durch | Image:ZnLsg_SensorMicrobit2.png|Sensor verbunden durch Kugel aus Alufolie | ||
</gallery> | </gallery> | ||
</li> | </li> | ||
| Zeile 40: | Zeile 40: | ||
</li> | </li> | ||
<li> | <li> | ||
Verbinde die beiden Sensorteile mit einem Alufolienstück. Überprüfe ob das richtige Bild am micro:bit angezeigt wird. | Verbinde die beiden Sensorteile mit einem Alufolienstück. Überprüfe, ob das richtige Bild am micro:bit angezeigt wird. | ||
</li> | </li> | ||
</ul> | </ul> | ||
| Zeile 49: | Zeile 49: | ||
</li> | </li> | ||
<li> | <li> | ||
Im micro:bit ist eine Uhr eingebaut. Diese startet bei 0 wenn der micro:bit eingeschaltet wird. Der Befehl '''Laufzeit (ms)''' greift auf diese Uhr zu und gibt an, wie viele Millisekunden seit dem Starten des micro:bits vergangen sind. Die Abkürzung ms steht für Millisekunden. Eine Sekunde besteht aus tausend Millisekunden. | Im micro:bit ist eine Uhr eingebaut. Diese startet bei 0, wenn der micro:bit eingeschaltet wird. Der Befehl '''Laufzeit (ms)''' greift auf diese Uhr zu und gibt an, wie viele Millisekunden seit dem Starten des micro:bits vergangen sind. Die Abkürzung ms steht für Millisekunden. Eine Sekunde besteht aus tausend Millisekunden. | ||
</li> | </li> | ||
<li> | <li> | ||
Um die Zeit zu erhalten, die das Spielzeugauto vom | Um die Zeit zu erhalten, die das Spielzeugauto vom Start- bis zur Ziellinie fährt, zieht der micro:bit die Startzeit von der Zielzeit ab. | ||
Zum Beispiel: Das Auto fährt 300 ms nach dem Starten des micro:bits über den | Zum Beispiel: Das Auto fährt 300 ms nach dem Starten des micro:bits über den Startsensor und nach 500 ms über den Zielsensor. Dann rechnet er 500 – 300 = 200 ms. Also benötigt das Auto vom Start bis zum Ziel 200 ms. | ||
</li> | </li> | ||
<li> | <li> | ||
Speichere die Zeit in einer Variable, wenn das Auto über den | Speichere die Zeit in einer Variable, wenn das Auto über den Startsensor fährt. Damit merkt sich der micro:bit diese Zeit. | ||
<br clear=all> | <br clear=all> | ||
[[Datei: ZnLsg_ZeitSpeichern.png|left]] | [[Datei: ZnLsg_ZeitSpeichern.png|left]] | ||
| Zeile 62: | Zeile 62: | ||
</li> | </li> | ||
<li> | <li> | ||
Ziehe die aktuelle Zeit von der vorher gespeicherten Zeit ab, wenn das Auto über den | Ziehe die aktuelle Zeit von der vorher gespeicherten Zeit ab, wenn das Auto über den Zielsensor fährt. Dadurch erhält man die Fahrtzeit des Autos auf der Strecke. | ||
</li> | </li> | ||
<li> | <li> | ||
| Zeile 72: | Zeile 72: | ||
<li> | <li> | ||
Eine Millisekunde ist ein Tausendstel einer Sekunde. Deswegen zeigt der micro:bit sehr große Zahlen an. | Eine Millisekunde ist ein Tausendstel einer Sekunde. Deswegen zeigt der micro:bit sehr große Zahlen an. | ||
Rechne die Fahrtzeit durch Tausend um eine lesbare Zahl zu erhalten. Auf der LED-Matrix | Rechne die Fahrtzeit durch Tausend, um eine besser lesbare Zahl zu erhalten. Auf der LED-Matrix erscheinen dann die Sekunden vor dem Punkt und die Millisekunden nach dem Punkt. | ||
</li> | </li> | ||
<li> | <li> | ||
Wenn der erste Sensor anschlägt, zeige ein Zeichen auf der LED-Matrix an. Das hilft beim Erkennen ob der Sensor auch richtig auslöst. | Wenn der erste Sensor anschlägt, zeige ein Zeichen auf der LED-Matrix an. Das hilft beim Erkennen, ob der Sensor auch richtig auslöst. | ||
</li> | </li> | ||
</ul> | </ul> | ||
Aktuelle Version vom 17. Dezember 2019, 10:49 Uhr
Hilfestellung und Lösung zur Aufgabe Zeitnehmung
Baue zuerst zwei Sensoren. Prüfe die Funktionstüchtigkeit der Sensoren mit dem micro:bit. Programmiere zuletzt ein Programm um die gefahrene Zeit zu berechnen.
Hinweis 1: Baue einen Sensor, der erkennt, ob ein Spielzeugauto darüber fährt
-
Der Sensor besteht aus zwei knapp nebeneinander liegenden Streifen Alufolie. Befestige diese mit doppelseitigem Klebeband auf der Strecke. Unten am Spielzeugauto ist ebenfalls ein am Boden schleifendes Stück Alufolie befestigt. Wenn das Auto über den Sensor fährt, verbindet dieses Stück Alufolie die beiden Streifen. Ein Alufolienstreifen wird an den 3V PIN des micro:bits angeschlossen, der andere an den PIN P0. Wenn kein Auto darüber fährt, besteht keine Verbindung zwischen den Alufolienstreifen und es liegt keine Spannung an P0 an. Der micro:bit erkennt an seinem PIN P0 Stromsignale. Wenn ein Auto über den Sensor fährt liegen 3V am PIN P0 an. Der micro:bit erkennt also, ob ein Auto über den Sensor fährt oder nicht.
-
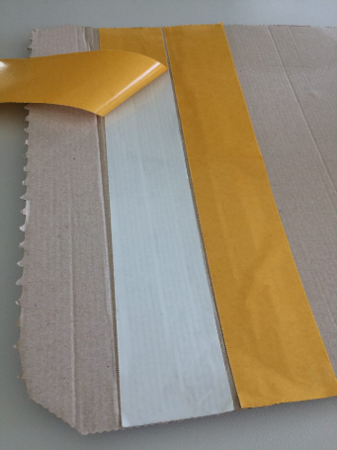 doppelseitiges Klebeband
doppelseitiges Klebeband -
 Alufolie
Alufolie -
 Alufolie getrennt
Alufolie getrennt
-
- Teste deinen Sensor indem du eine LED einschaltest, wenn ein passierendes Auto den Kontakt zwischen den beiden Alufolienstücken herstellt.



Hinweis 2: Mache dir einen Plan
-
Die leitenden Materialien müssen mit Ground und einem Pin auf dem micro:bit verbunden werden.
-
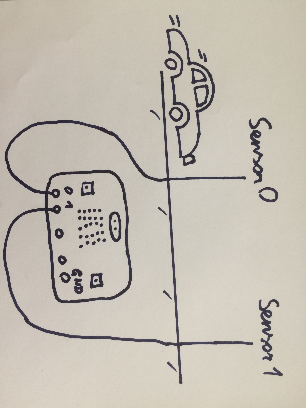 2 Sensoren
2 Sensoren -
 Sensor 1 aktiviert
Sensor 1 aktiviert -
 Sensor 2 aktiviert
Sensor 2 aktiviert
-
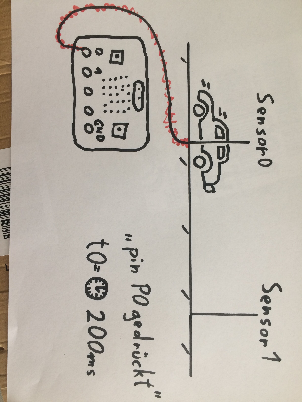
 Sensor mit micro:bit
Sensor mit micro:bit -
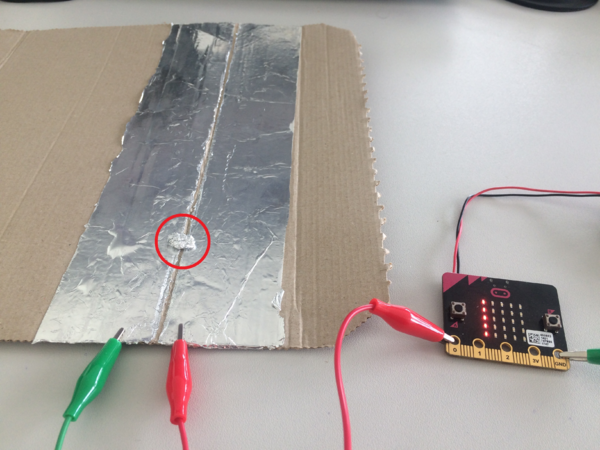 Sensor verbunden durch Kugel aus Alufolie
Sensor verbunden durch Kugel aus Alufolie
-





Hinweis 3: Sensoren prüfen
-
Zeige bestimmte Bilder an, wenn die Sensoren aktiviert werden.
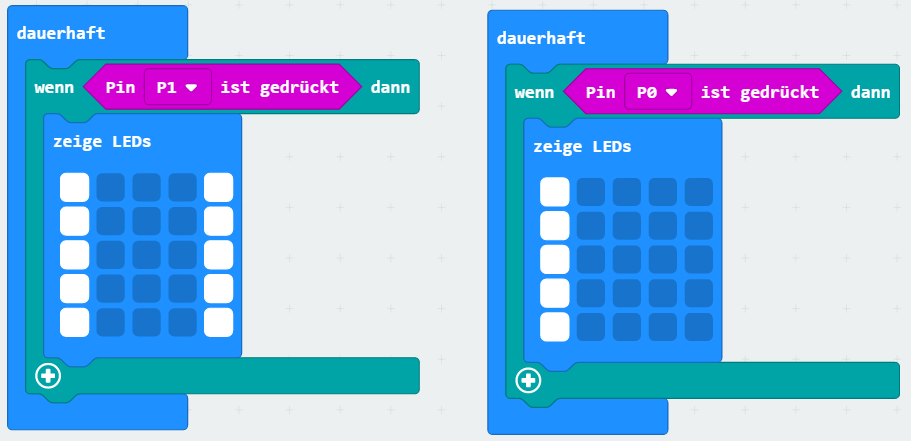
- Verbinde die beiden Sensorteile mit einem Alufolienstück. Überprüfe, ob das richtige Bild am micro:bit angezeigt wird.

Hinweis 4: Zeitnehmung programmieren
- Der micro:bit hat keine eigene Stoppuhr-Funktion. Programmiere eine Stoppuhr mithilfe der eigenen Uhr des micro:bits.
- Im micro:bit ist eine Uhr eingebaut. Diese startet bei 0, wenn der micro:bit eingeschaltet wird. Der Befehl Laufzeit (ms) greift auf diese Uhr zu und gibt an, wie viele Millisekunden seit dem Starten des micro:bits vergangen sind. Die Abkürzung ms steht für Millisekunden. Eine Sekunde besteht aus tausend Millisekunden.
- Um die Zeit zu erhalten, die das Spielzeugauto vom Start- bis zur Ziellinie fährt, zieht der micro:bit die Startzeit von der Zielzeit ab. Zum Beispiel: Das Auto fährt 300 ms nach dem Starten des micro:bits über den Startsensor und nach 500 ms über den Zielsensor. Dann rechnet er 500 – 300 = 200 ms. Also benötigt das Auto vom Start bis zum Ziel 200 ms.
-
Speichere die Zeit in einer Variable, wenn das Auto über den Startsensor fährt. Damit merkt sich der micro:bit diese Zeit.

- Ziehe die aktuelle Zeit von der vorher gespeicherten Zeit ab, wenn das Auto über den Zielsensor fährt. Dadurch erhält man die Fahrtzeit des Autos auf der Strecke.
-
Zeige diese Fahrtzeit nun auf dem micro:bit an.
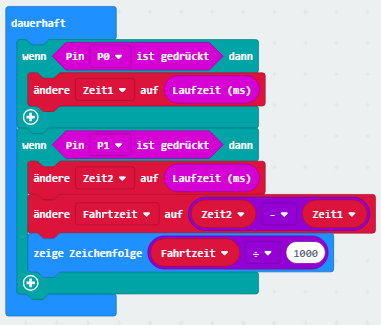
- Eine Millisekunde ist ein Tausendstel einer Sekunde. Deswegen zeigt der micro:bit sehr große Zahlen an. Rechne die Fahrtzeit durch Tausend, um eine besser lesbare Zahl zu erhalten. Auf der LED-Matrix erscheinen dann die Sekunden vor dem Punkt und die Millisekunden nach dem Punkt.
- Wenn der erste Sensor anschlägt, zeige ein Zeichen auf der LED-Matrix an. Das hilft beim Erkennen, ob der Sensor auch richtig auslöst.


Der vollständige Lösungsvorschlag sieht dann so aus:
